





Pētījuma nosaukums: Pētījums par datorredzes paņēmienu attīstību industrijas procesu norises automatizācijai
Pētījuma īstenotājs: Elektronikas un datorzinātņu institūts
Pētījuma mērķi un iegūtie rezultāti:
Projekta mērķis bija izpētīt un attīstīt paņēmienu kopu industrijas procesu norises automatizācijai, izmantojot vizuālās informācijas ieguvi (2D, aktīvā un pasīvā 3D u.c.) un tās apstrādi ar mašīnmācīšanās metodēm (neironu tīkli, “deep learning”, klasifikatori u.c.).
Pētījums sastāvēja no 2 dažādām aktivitātēm:
1. Rūpnieciskais pētījums par datorredzes datu ieguves un apstrādes metodēm un integrēšana ar industriālo robotu komponentēm, kas ietvēra:
- pētījumu par 2D un 3D (aktīvā un pasīva) datu ieguves paņēmieniem, to realizāciju un novērtēšanu (Kinect, Realsense, ZED);
- pētījumu par datorredzes algoritmiem un metodēm, to piemērošanu industriālā robota vadīšanai un precīzai robota izpildei;
- dziļās apmācības – deep learning – metodes izpēti un realizāciju un marķētas datu kopas izveidi;
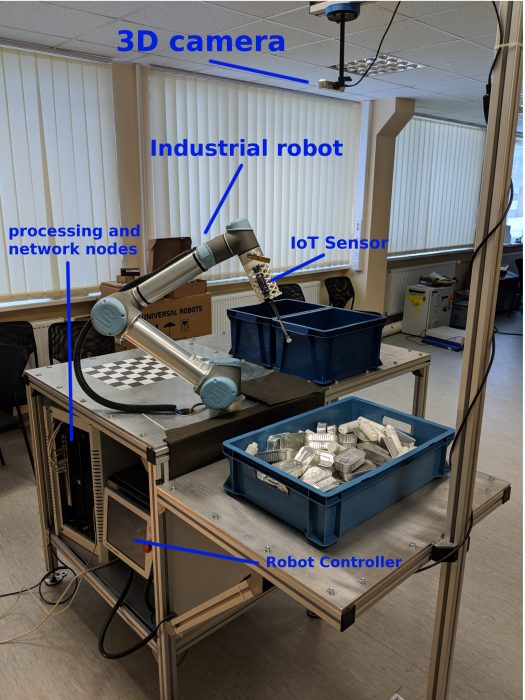
- industriālā robota pieejamo komponenšu izpēti un integrēšanu ar datorredzes risinājumiem, ieskaitot atbilstoša rūpnieciskā pētījuma maketa izveidi.
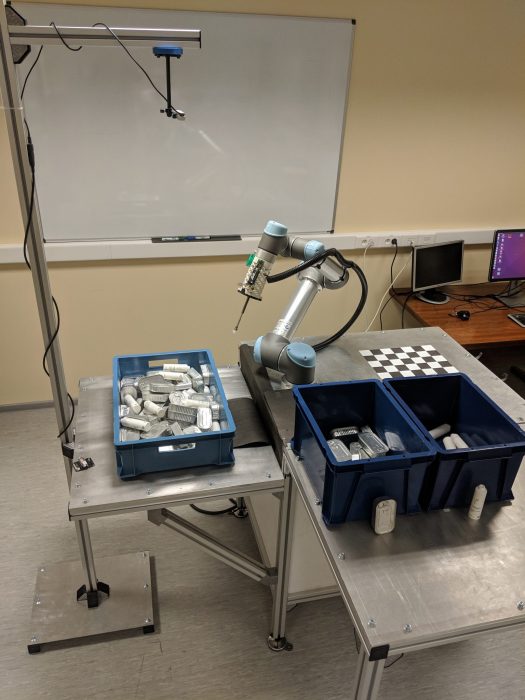
2. Eksperimentālās aktivitātes, kuras īstenošanas laikā tika izveidots rīku komplekts (attēlu ieguves, skaitļošanas un izpildmehānismu aprīkojums kopā ar atbilstošiem mašīnmācīšanās algoritmiem) un testēta tā darbība reāliem apstākļiem pietuvinātā vidē – rīku kopa un datorredzes algoritmi tiks izstrādāti tikai objektu atpazīšanai un lokalizēšanai, lai tos paņemtu nodošanai tālākām automatizācijas darbībām, kuras projekta ietvaros netiek apskatītas.
Projekta ietvaros EDI izstrādātā tehnoloģiskā risinājuma priekšrocība ir modulārā sistēmas komponenšu (sensori, kameras, stereo moduļi, robota manipulatori u.c.) arhitektūra, kas ļauj ar mazām izmaiņām izmantot dažādu ražotāju un modeļu iekārtas. Sistēmas modularitāte tiek balstīta uz ROS (Robotu Operētājsistēmas) programmatūru. Sistēmas darbība aplūkojama šajā demonstrācijas video: https://www.youtube.com/watch?v=gmsn85Qk5WY.
Publikācijas:
- Janis Arents, Ricards Cacurs, and Modris Greitans, “Integration of Computervision and Artificial Intelligence Subsystems with Robot Operating System Based Motion Planning for Industrial Robots”, Automatic Control and Computer Sciences, 2018, Vol. 52, No. 5, pp. 392–401: http://pleiades.online/contents/autcont/autcont5_18v52cont.htm
- Elvijs Buls, Roberts Kadiķis, Ričards Cacurs, Jānis Ārents. “Generation of Synthetic Training Data for Object Detection in Piles”, 2018 The 11th International Conference on Machine Vision, November 1-3, 2018 | Munich, Germany. Dr. R. Kadiķis prezentēja zinātnisko rakstu par projektā veiktajiem pētījumiem sintētisku apmācības datu ģenerēšanā un to izmantošanā industrijas uzdevumu automatizācijā starptautiskajā konferencē „The 11th International Conference on Machine Vision” (ICMV 2018) Minhenē 01.11.-03.11.2018. Tā publiski būs pieejama apm. 2019. g. maijā konferences ICMV 2018 publikāciju materiālā: http://icmv.org/.
 Projekti
Projekti




